A grande dificuldade da gente que lida com robótica, são as partes mecânicas como: motores de passo caixas de redução engrenagens etc…
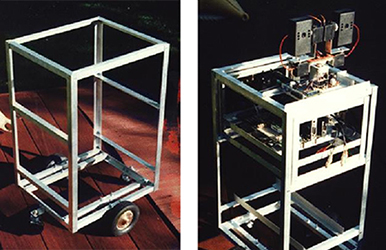
Aqui você verá o robô 386, que não é uma ideia nova, mas pouco difundida.
É usado para isso um antigo computador 386 (mas pode-se usar outro) inteiro em uma caixa, com dois motores para tracionar. É um negocio que a primeira vista parece uma lata de lixo, mas o potencial é incrível.
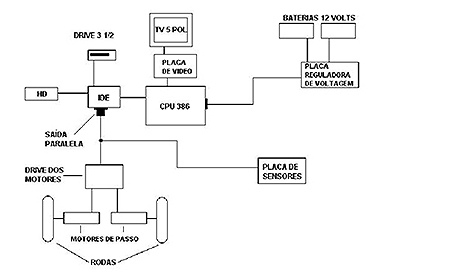
Os motores são controlados pela porta paralela e por aí mesmo o sensores de ambiente interagem com o programa e as rodas.
Este é o diagrama de blocos básico do robô 386
A programação requer que um pouco de experiência no controle de portas do PC. Pode se fazer em QBasic, C, Delphi, VB, Pascal, etc. O que interessa nessa máquina é a facilidade na aquisição das peças e o baixo custo, mas como nem tudo é fácil você vai ter que ralar um pouco nas adaptações, como alimentação por exemplo.
As partes fáceis:
- Uma placa mãe 386, 486 ou o que você tiver aí
- Placa de vídeo pode ser CGA de preferência com saída de vídeo RCA (para usar uma TV preto e branco de 5 polegadas) ou se você quiser colocar um VGA mesmo com aqueles monitores pequenos é melhor ,mas o nosso objetivo é manter o preço baixo .
- Um controlador de ide, um HD pequeno, você só vai precisar do DOS.
- Uma unidade de disquete, ou unidade de CD, ou de DVD (Para transferir os programas do seu PC para o robô 386).
As partes que você vai ter que fazer:
- Uma placa em que alimente as seguintes voltagens +12 , -12 , +5 , -5.
- Três reguladores para cada voltagem.
- Duas baterias de 12 volts 7 amperes.
- Uma placa de entrada de dados dos sensores com esse circuito básico por exemplo.
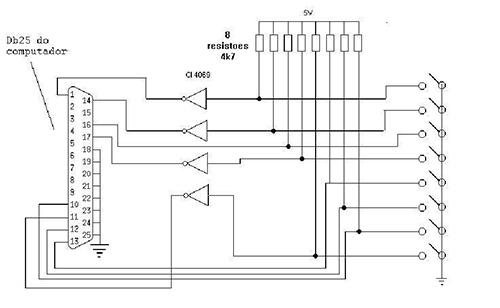
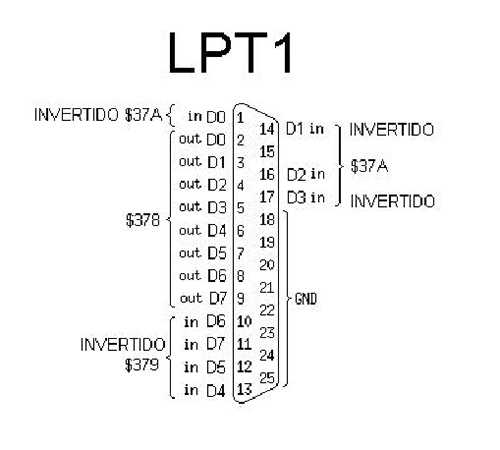
Atenção quanto ao endereço na hora de programar, porque apesar de identificarmos a porta paralela como 378h, o conector da paralela tem 3 endereços e para entrada de dados são 379h e 37Ah. Também quanto à polaridade dos sinais, alguns deles são invertidos.
Atenção para ligar qualquer dispositivo ou circuito, porque a carga eletrostática do corpo pode queimar de modo irreparável a porta paralela ou a placa mãe, a melhor coisa é não tocar com as mãos nos pinos da paralela com o computador ligado, não ligar ou soldar nenhum circuito com o computador ligado, use ferro de solda isolado (estação de solda) ou desligue da tomada para fazer a solda rapidamente.
Uma visão melhor dos pinos da porta paralela pode ser estudada na figura abaixo
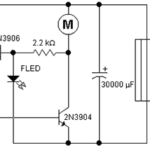
Sensor de aproximação
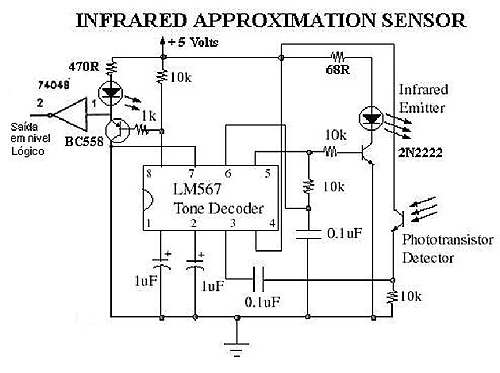
Este circuito se mostrou eficiente na detecção de objeto a sua frente sua montagem é simples.
Para uma correta navegação sem esbarrar em nada recomendamos usar oito sensores em volta do robô, cada um deles envia um sinal diferente ao computador sobre a sua posição, o computador ao receber o sinal de um sensor manda os motores pararem e girarem para evitar a colisão.
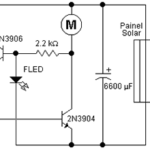
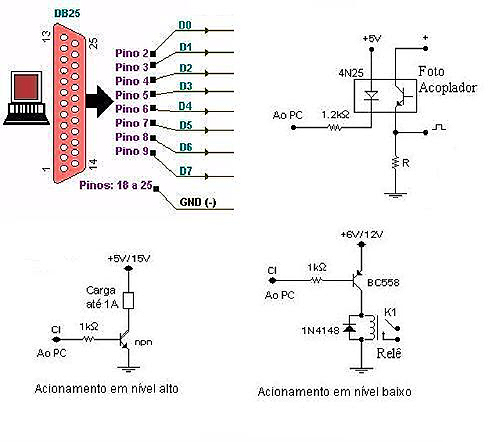
Saída de controle para os motores
Para sair com os dados que vão acionar os motores de passo ou DC comuns (no caso deste último, precisará de caixas de redução), pode até se usar uma parafusadeira de baixo custo, elas tem excelente torque e baixa velocidade
Este esquema lhe ajudará bastante.
Driver para motor de passo
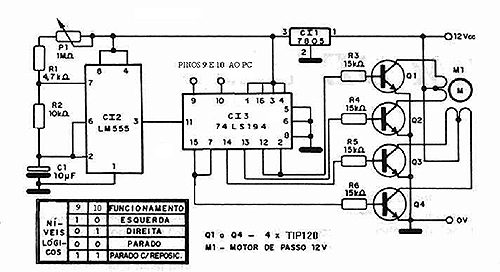
Este driver é um dos mais simples, tem peças baratas e excelente confiabilidade, ao aplicar os níveis lógicos conforme a tabela da figura, ele gira, para, inverte ou trava o motor.
A velocidade deve ser ajustada para que o robô não saia sem controle por aí sem dar tempo ao processador para comandá-lo e evitar a colisão.
As principais sequências de ligações dos motores de passo:
- Azul laranja
- Branco amarelo
- Vermelho marrom
- Amarelo vermelho
O fio que sobrar é o da alimentação.
Válido apenas para os motores de 5 ou 6 fios.
Então agora você já tem uma possibilidade muito boa de iniciar na automação por computador e robótica.
Boa Sorte